Yuntao Peng
有志者,事竟成 - Where there is a will there is a way
Our team has two scopes. The first is JP prime, in which we cooperates with bussiness and PM teams to develop Amazon prime service for Japan localized needs. The other is customer engagement. We build a platform to power personalized customer engagement experience. We recommend personalized actions for customers and track their behavior to reward them for deeper engagement. I participated in both parts, developing and maintaining new features and doing tech designs in serverless fashion.
Search Architecture Department is responsible for maintaining Baidu search offline web page library, web index library and online real-time search service. My team is in charge of the entire back-end architecture. I mainly participated in the build of back-end intelligent architecture. We developed and maintained an online model inference framework. Through the mixed deployment of models, one instance can respond to multiple inference requests, which greatly improved the utilization rate of computing resources; through platform-based design, the deployment details were shielded from access services, so that only simple RPC requests are required to obtain highly stable model inference services with success rate of 99.9%.
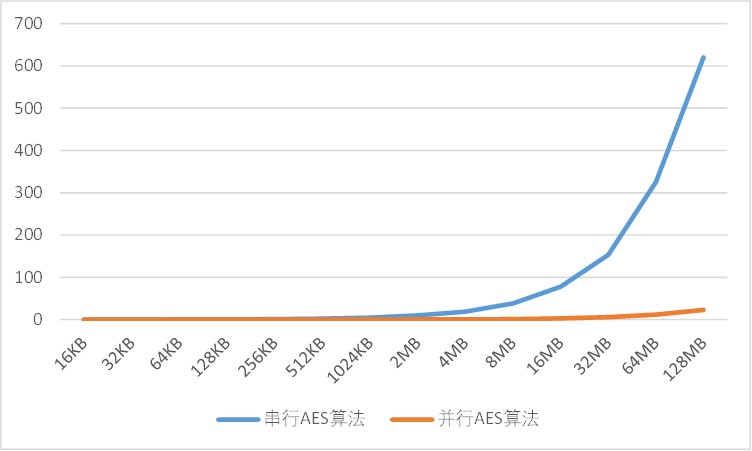
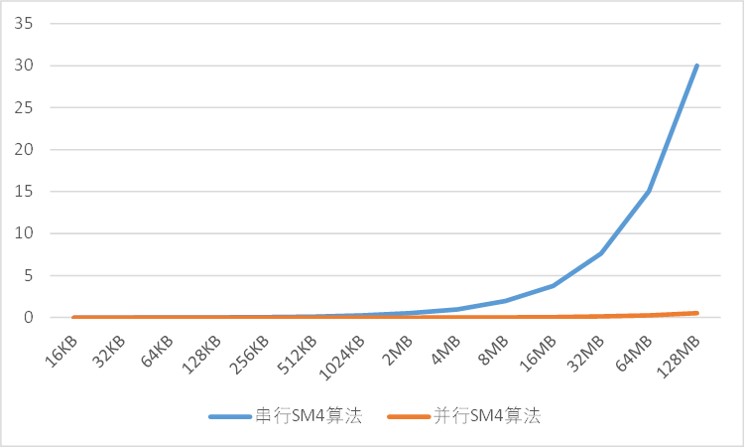
Based on AES (Advanced Encryption Standard) and SM4 (Commercial Cryptography Standard), I designed two novel parallel encryption algorithms and implemented them on the Nvidia GPU with special design of data transmission optimization
To maintain human trust, in this research, a trust repair framework was developed based on a human-to-robot attention transfer H2R-AT model and a user trust study
It is challenging for a robot to detect its failures or failure tendency by themselves. In this research, we focus on using human attention to remind robots of its potential failures, in cooperation such as daily assistance and cooperated manufacturing. A novel deep learning architecture will be designed to accurately understand human instructions, and then assist with robot behavior corrections.







